

讓虛擬角色更自然地穿衣服,研究員用AI解決角色和服裝之間復雜交互
由于角色和服裝之間的復雜交互,制作角色穿衣動畫十分具有挑戰性。由喬治亞理工學院博士生與教授,以及Google Brain研究人員組成的團隊采用了深度強化學習(deepRL)來自動發現由神經網絡表示的穩定穿衣控制策略。盡管deepRL在學習復雜運動技能方面已經取得了一些成功,但學習算法的數據要求性質與穿衣任務所需的高昂布料模擬計算成本不一致。
名為《Learning to Dress: Synthesizing Human Dressing Motion via Deep Reinforcement Learning(學習穿衣:通過深度強化學習來合成人類穿衣運動》的論文于日前正式發布,并首次證明通過適當設計的輸入狀態空間和回報函數,研究人員可以將布料模擬整合至deepRL框架并學習穩定的穿衣控制策略。研究人員引入了觸覺信息的顯著呈現來引導穿衣過程,并在訓練期間將其用于回報函數以提供學習信號。
1. 理解穿衣問題
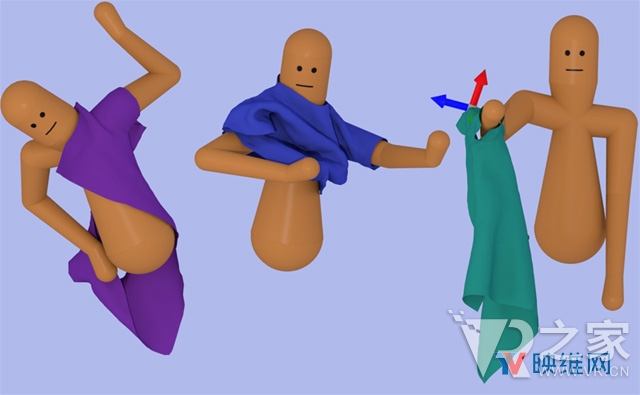
我們每天都會穿衣搭配,比如說穿上T恤或夾克。但對于機器執行或計算機模擬而言,這是計算成本高昂且復雜的任務。論文描述的解決方案通過物理模擬和機器學習技術來合成動畫。物理引擎用于模擬角色運動和布料運動。另一方面,神經網絡上的深度強化學習則用來產生角色運動。
2. 物理引擎和神經網絡上的強化學習
論文作者提出了一種觸覺信息的突出呈現以引導穿衣過程。然后當訓練神經網絡時,在回報函數中使用這種觸覺信息來提供學習信號。由于任務過于復雜無法一次執行,因此穿衣任務將分成若干子任務,從而實現更好的控制。
為了匹配從一個任務的輸出狀態分布到下一個任務的輸入分布,研究人員提出了一種policy sequencing algorithm(策略排序算法)。相同的方法用于生成用于各種穿著任務的角色控制器,例如穿著T恤和穿著夾克。
3. 穿衣是一項復雜的任務,所以將其分成多個子任務
研究人員的方法將穿衣任務分成了一系列的子任務。接下來,狀態機將引導任何的進行。例如,穿著夾克由四個子任務組成:
第一個手臂穿過袖筒。
將第二個手臂移到后面,為第二個袖筒定位。
第二個手臂穿過第二個袖筒。
最后,身體恢復至正常狀態。
為了學習控制策略,研究人員為每個子任務制定了單獨的強化學習問題。
Policy Sequencing Algorithm可以確保單獨的控制策略可以引導系統按順序執行穿衣序列。算法將一個子任務的初始狀態與序列中前一個子任務的最終狀態進行匹配。通過應用所得到的控制策略,系統可以生成各種成功的穿衣動作。
穿衣任務中的每個子任務都進行了公式化,編程為部分可觀察的馬爾可夫決策過程(Markov Decision Process;POMDP)。借助動態動畫和機器人工具包(Dynamic Animation and Robotics Toolkit;DART),以及基于NVIDIA PhysX的布料動力學,系統可以模擬角色動力學。
4. 總結和提升空間
通過深度強化學習和物理模擬,研究人員成功創建了一個學習如何制作角色穿衣動畫的系統。從子任務中,系統單獨學習每個子任務,然后將它們與狀態機連接。結果發現,優選布料觀察和回報函數是方法成功的重要因素。
系統目前僅適用于上半身穿衣。對于下半身,系統需要在控制器中保持平衡。當使用包含記憶的控制策略架構時,子任務的數量可能會減少。這將有助于生成所學的技能。
文章來源:映維網 如轉載請標明出處
原文鏈接 : https://yivian.com/news/53033.html
未經授權,禁止轉載,違者必將追究法律責任。


