

斯坦福研發(fā)新電子手套,為機(jī)器人帶來人類般靈活操作
斯坦福工程人員開發(fā)了一種包含傳感器的電子手套,并有望在未來給機(jī)器人手臂帶來人類認(rèn)為是理想當(dāng)然的靈活度。
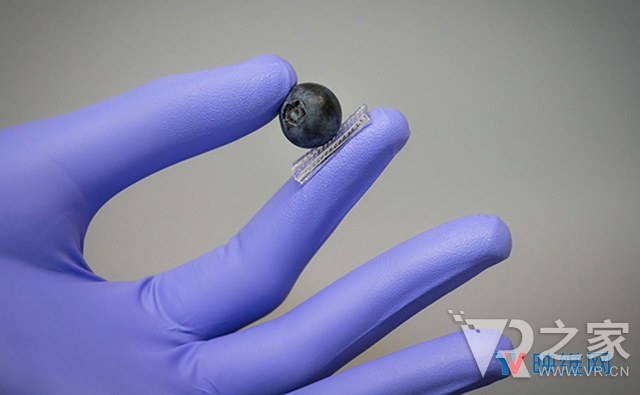
在一份發(fā)表于《Science Robotics》的論文中,美國國家工程院院士,斯坦福大學(xué)化學(xué)工程系教授鮑哲楠及其團(tuán)隊(duì)證明了傳感器能夠允許機(jī)器人手臂握持并不會(huì)擠爆嬌弱易碎的漿果和乒乓球。鮑哲南表示,位于手套指尖的傳感器能夠同時(shí)模擬實(shí)現(xiàn)人類靈活度的兩個(gè)關(guān)鍵性質(zhì):壓力的強(qiáng)度和方向。
她說道:“這項(xiàng)技術(shù)幫助我們走向了在未來某一天給機(jī)器人帶來人類皮膚中發(fā)現(xiàn)的感知能力的道路。”
研究人員正在完善技術(shù),以支持其自動(dòng)控制傳感器。但如果能夠?qū)崿F(xiàn),穿戴這種手套的傳感器將能靈活地用拇指和食指來握持雞蛋,并且不會(huì)擠碎或脫落。
這種電子手旨在模擬人體皮膚層為給我們帶來超凡靈活度的協(xié)同工作方式。外層皮膚充滿了“傳感器”(感覺神經(jīng)),可以檢測(cè)壓力,熱量和其他刺激。
手指和手掌的“觸碰傳感器”尤其豐富。這種“傳感器”能夠與名為棘層的皮膚子層一起工作。
位于皮膚基底層前面的棘層十分關(guān)鍵。當(dāng)我們的手指觸碰一件物品時(shí),皮膚外層將更接近于棘層。位于棘層最上方的感覺神經(jīng)將能知覺到輕微的觸感。更強(qiáng)烈的壓力將迫使皮膚外層進(jìn)一步靠近棘層,觸發(fā)更多的感覺神經(jīng),從而引發(fā)更強(qiáng)烈的觸感。
但測(cè)量壓力強(qiáng)度只是棘層的一部分功能。這個(gè)凹凸不平的皮膚子層同時(shí)有助于說明壓力或剪切力的方向。例如,當(dāng)一根手指向北推時(shí),位于棘層“山丘”的南坡將產(chǎn)生強(qiáng)烈的信號(hào)。
對(duì)于我們?nèi)祟惸軌蛴媚粗负褪持篙p柔但牢固地握持一個(gè)雞蛋,這種剪切力的感知能力起了相當(dāng)一部分作用。Clementine Boutry和Marc Negre領(lǐng)導(dǎo)了模仿這種人體機(jī)制的電子傳感器開發(fā)。機(jī)器人手套指尖上的每個(gè)傳感器由三個(gè)柔性層組成。頂層和底層屬于電活性,中間是橡膠絕緣層,彼此能夠協(xié)同工作。
研究人員在各個(gè)相對(duì)表面鋪設(shè)了電線網(wǎng)格,并且令它們彼此垂直轉(zhuǎn)動(dòng)以產(chǎn)生密集的小型感測(cè)像素陣列。他們同時(shí)令底層如同人類皮膚棘層一樣顛簸不平。
中間的橡膠絕緣體可以簡單地保持頂層和底層電極的隔開。但這種分離至關(guān)重要,因?yàn)榭拷唤佑|的電極可以存儲(chǔ)電能。
當(dāng)機(jī)器人手指向下壓并將上層電極擠向底層時(shí),儲(chǔ)存的電能增加。底層的“山丘”和“山谷”提供了一種將壓力強(qiáng)度和方向映射到垂直網(wǎng)格特定點(diǎn)位的方法,就像人體皮膚一樣。
為了測(cè)試技術(shù),研究人員將三層傳感器嵌入至橡膠手套的指尖上,并穿戴在機(jī)器人手上。他們的最終目標(biāo)是將傳感器直接嵌入至機(jī)器手臂的皮膚狀覆蓋物中。
在一項(xiàng)實(shí)驗(yàn)中,研究團(tuán)隊(duì)令穿戴電子手套的機(jī)器人手輕輕觸摸漿果(不壓爆)。他們同時(shí)利用傳感器檢測(cè)適當(dāng)?shù)募羟辛砦粘制古仪颍ú幻撀洌⒛軌蛞苿?dòng)和舉起乒乓球。
鮑哲楠指出,通過適當(dāng)?shù)木幊蹋宕鬟@種觸感手套的機(jī)器人手可以執(zhí)行重復(fù)性任務(wù),例如從傳送帶上拿起雞蛋并將其放入紙箱之中。
另外,這種技術(shù)可對(duì)機(jī)器人輔助手術(shù)帶來幫助,因?yàn)榫_的觸碰控制對(duì)手術(shù)而言至關(guān)重要。但鮑哲楠的最終目標(biāo)是,開發(fā)一種無需預(yù)先編程即可自動(dòng)施加適當(dāng)力量并安全地處理物體的先進(jìn)手套。
她指出:“我們可以編程一個(gè)機(jī)器人手,令其觸碰漿果而壓爆。但我們距離能夠觸摸并檢測(cè)到它是漿果,并令機(jī)器人能夠撿起它還有很長的路要走。”
文章來源:映維網(wǎng) 如轉(zhuǎn)載請(qǐng)標(biāo)明出處
原文鏈接 : https://yivian.com/news/53270.html
未經(jīng)授權(quán),禁止轉(zhuǎn)載,違者必將追究法律責(zé)任。


